During the good financial decision-making times of Covid lockdowns, etc. I decided it was a good idea to buy a license for the Fusion360 Generative Design extension...Good news, I did finally pay that off :) I had worked around, and been somewhat involved in a handful of Topology Optimization/Generative Design projects through my work, and I've found the tech super interesting for some time. So after the free trial, and feeling like I was just starting to gain some level of competence in Fusion360's tool....I done did it, and bought the year. Ok, now that I'm done justifying that to myself...I mean you...
<engineering/design> What I really like about Generative Design is that it forces the designer to think about the thing they are trying to design from it's core requirements: Forces, Interfaces, and Keep Outs. I think it's far from perfect, especially given the still very primitive Design For Manufacture capabilities these tools have (among other shortcomings, but this one is certainly a big one to me.)
<precision engineering> One last also (for now), but ALSO, what I find exciting about these tools from a precision engineering perspective, is that the above-mentioned focus on forces and interfaces, these tools are extremely well-suited to kinematic/exact constraint designs! I think every one of the Generative Design projects below features at least some aspects of kinematic constraint (I say, "I think" because I may or may not be writing this before I go through my files and remind myself what all I actually made vs what I just thought about making ¯\_(ツ)_/¯ )
Like a lot of people, I love me a 3d printing time lapse. I've experimented with a few different options over the years for capturing them, but I've struggled to get a camera mount for my Prusas that I was really happy with.
But I think I may finally have something that'll do the job and hold up for a while! And all it took was leveraging some generative design and metal 3d printing....I MAY have gone a smidge overboard on the fancy tools for solving a problem that I'm sure has already been solved a good many times over, but I had me a lot of fun in the process! :)
Among my previous attempts, some of my favorites have been those that are shot from a perspective that is locked to the part, and since my main printers are Prusa bed slingers, that means they have to be camera slingers too. Unfortunately, the combination of the heated bed and a cantilevered plastic arm have proven to be...sub-optimal. The heat from the bed, even well below the glass transition temp for the material, is still enough to really accelerate the creep, and they tend to get a bit droopy pretty quick.
So, when PCBWay reached out and offered me some free parts if I'd feature those parts on YouTube, and then mentioned that included their metal 3d printing services....well, it seemed like a good time to try again!
To ratchet the overkill up a notch further, I figured this was definitely a task that called for using a generative design tool to get some lightweight design options
Generative design, and it’s close cousin, topology optimization, combine some form of simulation, like finite element analysis, with an optimization algorithm to produce geometries that can maintain stresses and deflections within limits while using the bare minimum of material.
What I really love about using generative design tools, in addition to the cool shapes they make, of course, is that I feel like they force me to focus time up front on defining my requirements.
Things like:
What is attaching to what, and where. - “The interfaces.
Do these interfaces have to have any specific features on them?, “required geometries”
What are the loads and constraints I think these interfaces will see? - “Loads and constraints”
Any ‘keep out’ areas for things like tool access, cable routing, or any moving parts need clearance? - “Keep out zones”
And all that kind of fun stuff.
I feel like it pushes me to maintain more of a ‘big picture’ perspective on the design in a way that I think is great.
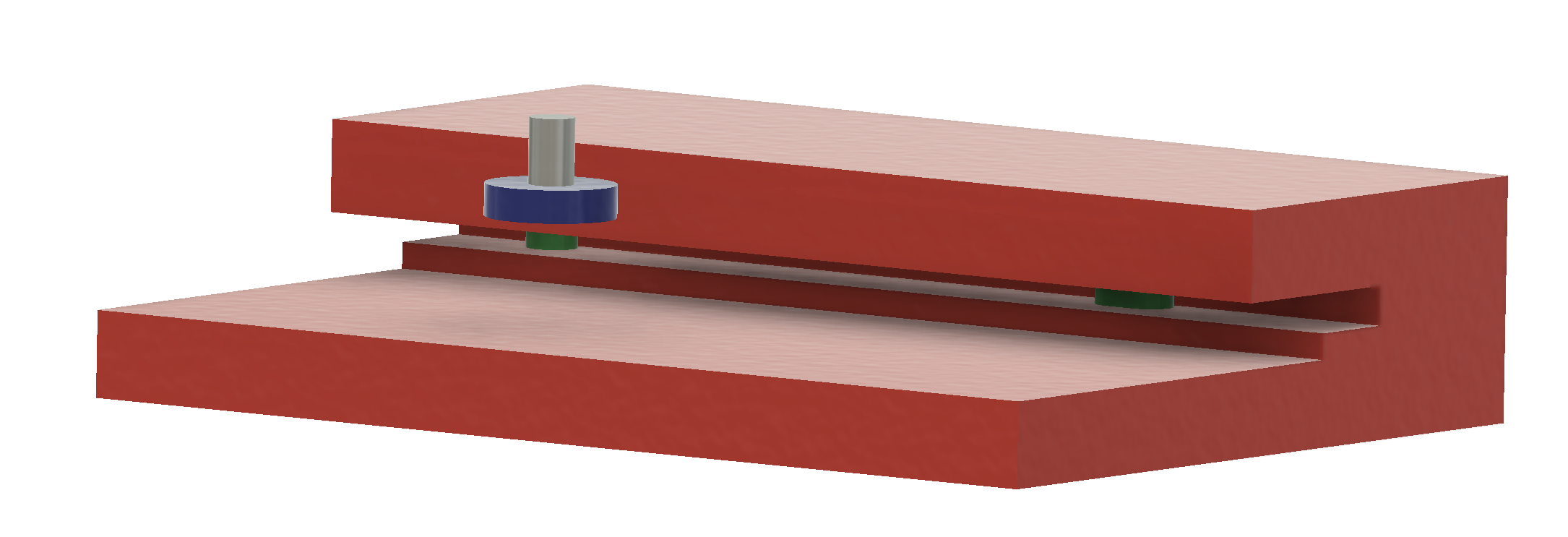
Taking a look at the screenshot showing what my end of the CAD for the camera mount looks like, we can also see that it makes for some just lovely model files :)
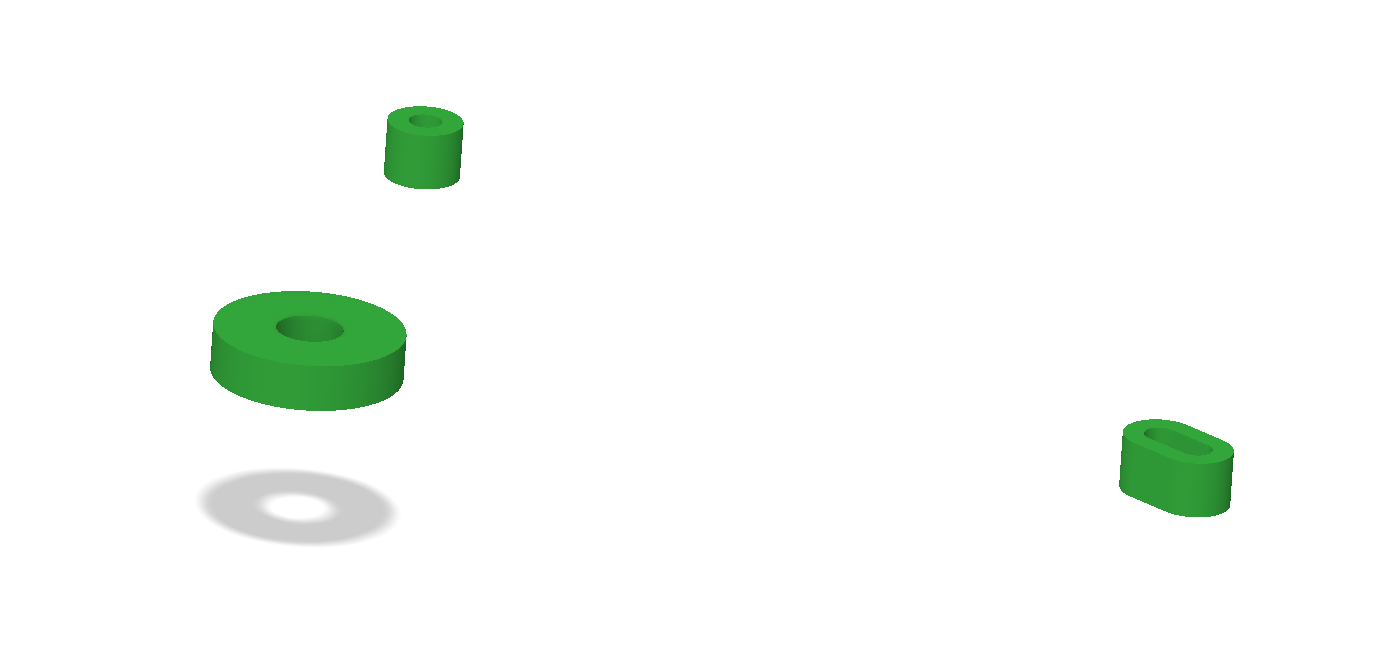
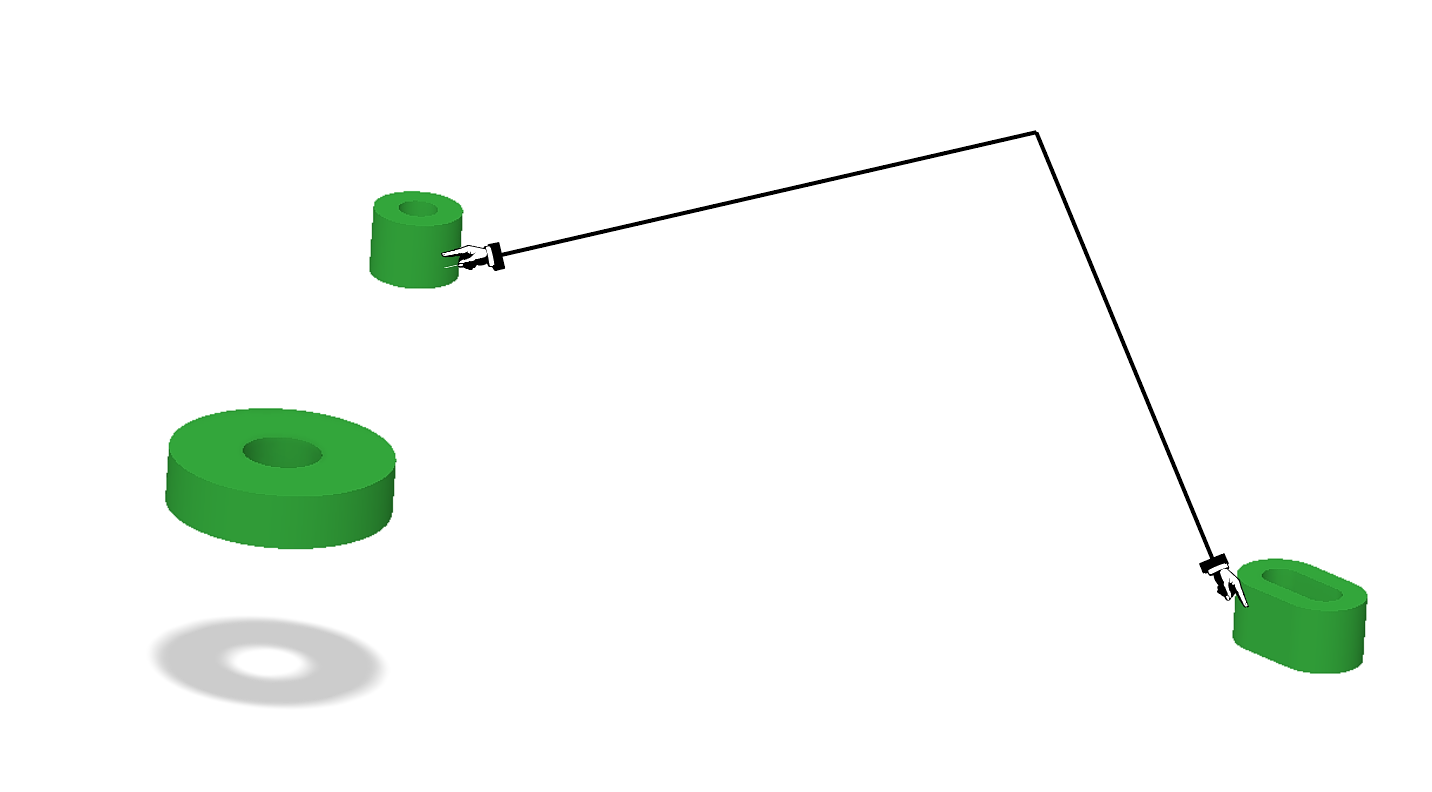
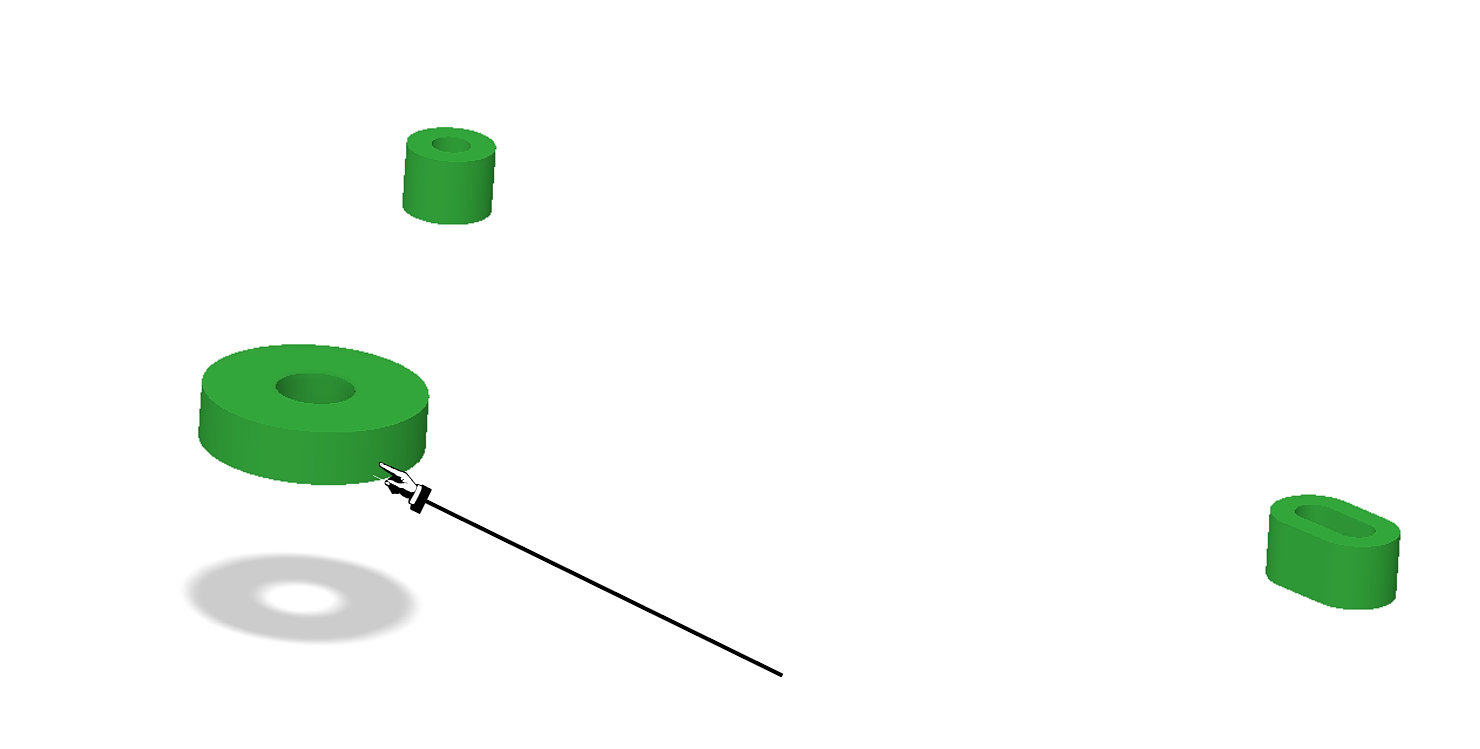
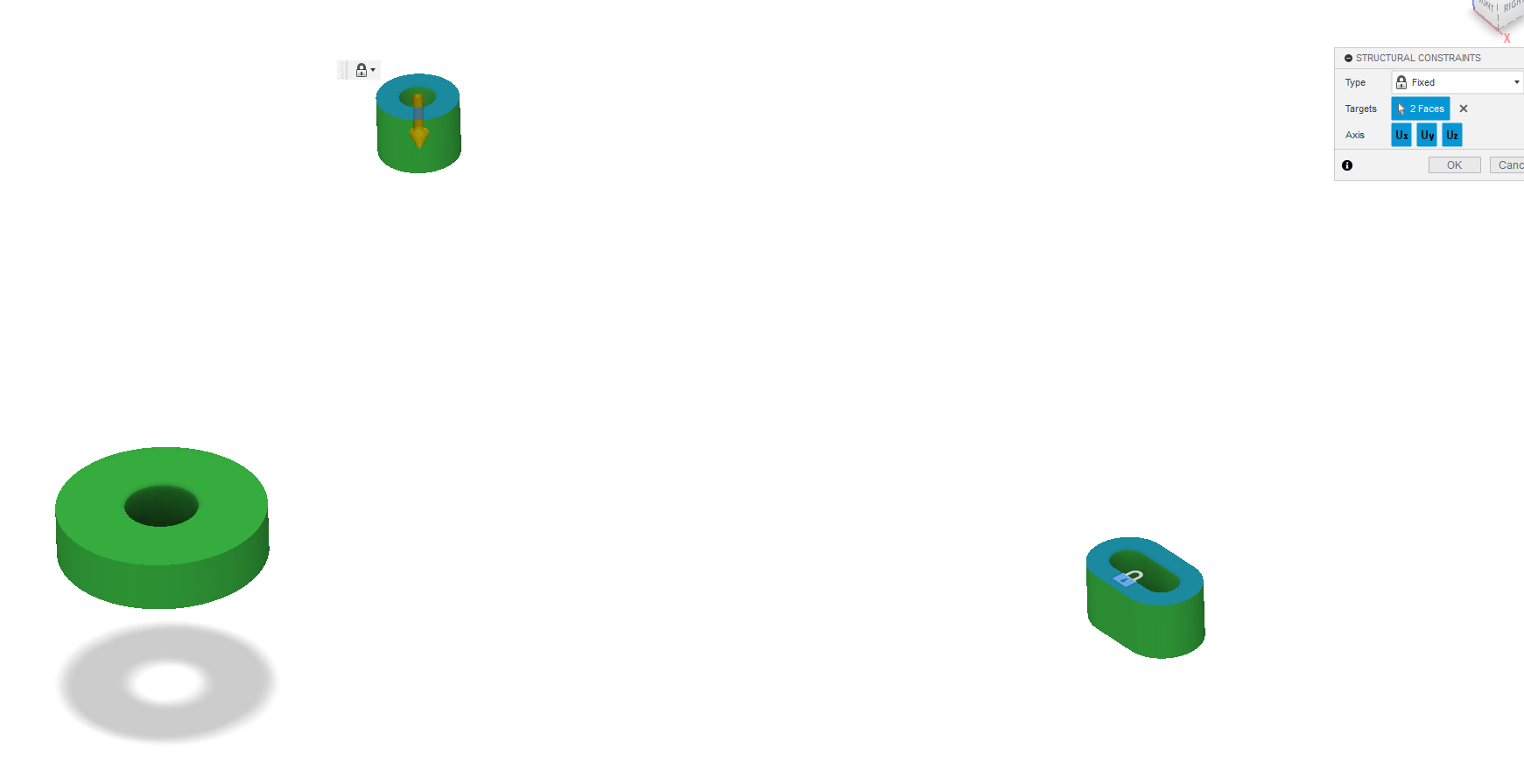
So what is it we're looking at in the above? Let's start by taking a look at the 'keeper' geometries. These are the three green bodies shown below. The larger one being the camera mount interface, and the two smaller ones are the mounting interfaces to the printer bed.
The bed mount points are intended to be direct replacements for the 6mm long, steel spacers that separate the bed heater from the Y-carriage on the Mk3.
Unfortunately, the center-to-center spacing between these spacers aren't symmetric, so I slotted one of the mounts in the design to allow me the flexibility on mounting.
The only other 'keeper' geometry is the camera mount point, which is basically just a beefy 1/4-20 washer.
It would have been cool to integrate the GoPro mount into the printed part, but because of my pretty limited experience with metal printed parts I wasn't confident enough in getting that to come out correctly without a few iterations. Plus, sticking with the 1/4-20 mount makes it compatible with a lot of other camera options, should I want to swap out the GoPro for something else down the line.
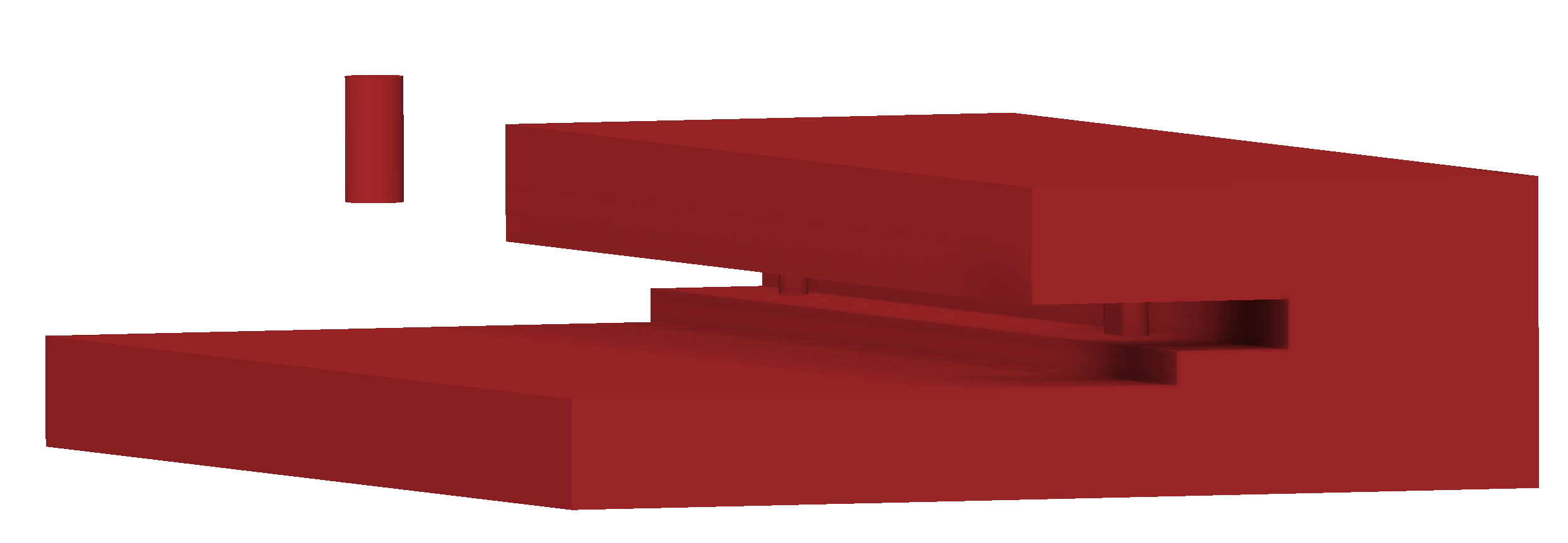
So, interfaces/keepers out of the way, what was that big ass red thing? The geometries that the software shows in red are the 'obstacle' geometries, which I tend to refer to more as "keep out zones". These are where I'm telling the software that it's not allowed to place material.
The big, blocky bit provides the keep out areas that cover the heated bed and Y-carriage parts above and below the spacers. The only other additional bodies are the posts that sit inside of the clearance holes for the fasteners that will need to go through my mount points.
And that's pretty much it for the 'CAD' portion of the design
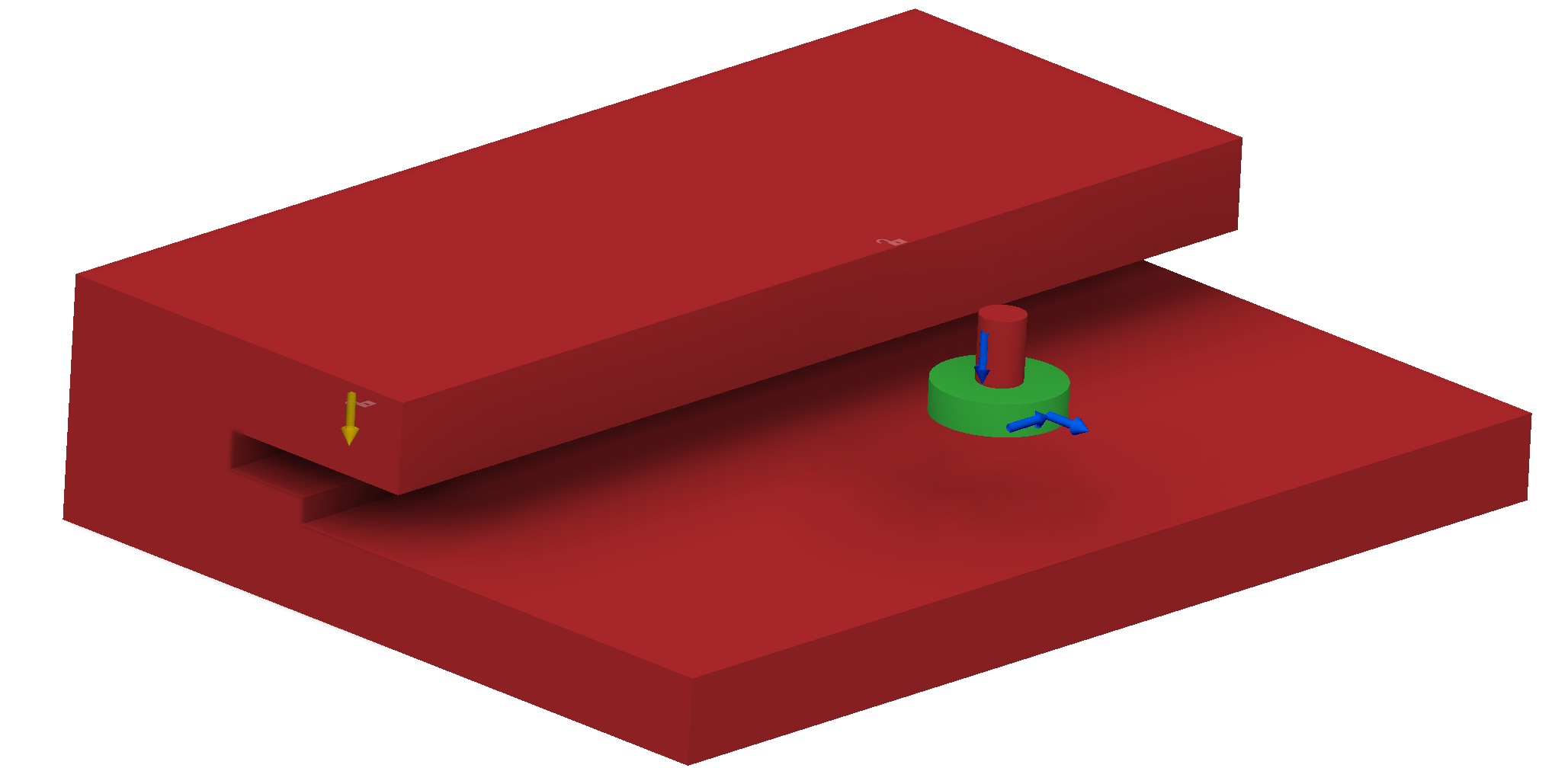
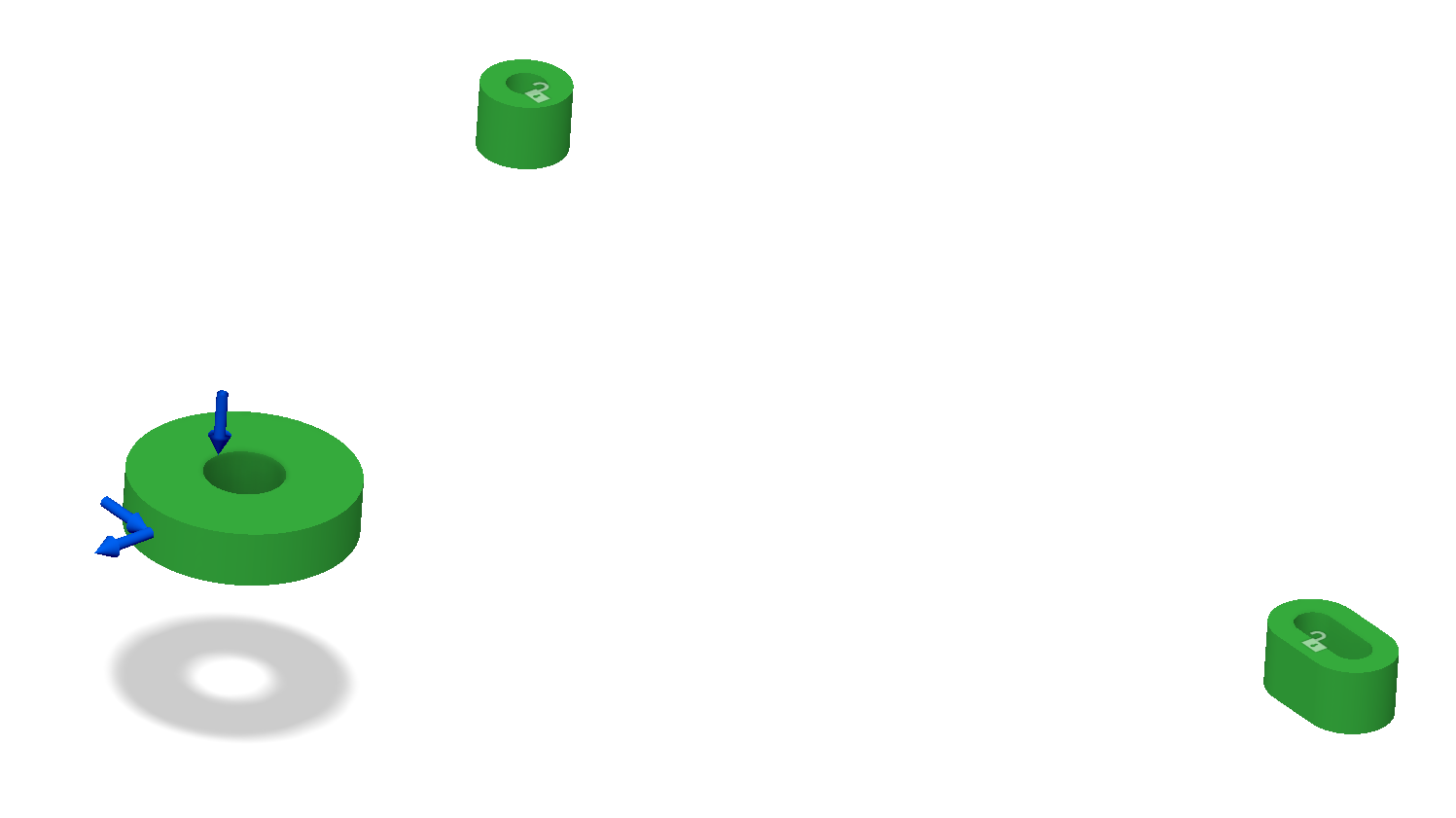
Now that the base geometries have been defined, it's time to apply some loads and constraints to them.
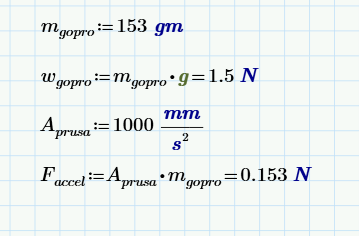
To get some estimates for the expected loads, I started by getting the mass for my GoPro and it's mount(s)....yeah, I realize the heft of these kind of wipes out the benefits of my optimized mount, but cest la vie.
I then estimated some accelerations I expect that mass to be subjected to and used some of that Newton goodness (F = ma) to get the forces. The accel limit in the Prusa Slicer software (which I'm guessing is the default, because I don't think that's one I've ever tweaked) is 1000mm/s^2, or 1 m/s^2. That's about 0.1g. So I rounded that up to about 1g for the Y, and I went with 2gs in Z to cover gravity plus some margin for the dynamic load. I also added about 0.5g to X, mainly just to ensure that it has SOME stiffness in this direction to handle some light jostling and such.
There are quite a few issues with how I've decided to do this, including the fact that this approach doesn't account for the additional offsets to the CG of the mass due to the GoPro's mounting. I decided to just add some additional margin to the load cases, in addition to the built-in Safety Factor in the solver, instead of creating a more 'accurate' loading scenario. While I still think this is a reasonable trade-off for this project, I'm hoping as I get more familiar with the software I'll learn better ways to structure these within a larger model, allowing some of this to be fed in parametrically...but we shall see
Now that my loads are applied, it's time to set some constraints. I set both of the bed mounts to be constrained in both Z and Y, but only the non-slotted one was constrained in X. This wasn't strictly necessary, since technically the slotted one is also constrained in X due to the friction of being sandwiched between the heated bed and carriage. But I wanted to also ensure there would be some stiffness in the part along this axis, and if it throught these mounts were both rigidly constrained, it could conceivably have the whole mount extend from only one bed mount and still satisfy the criteria.
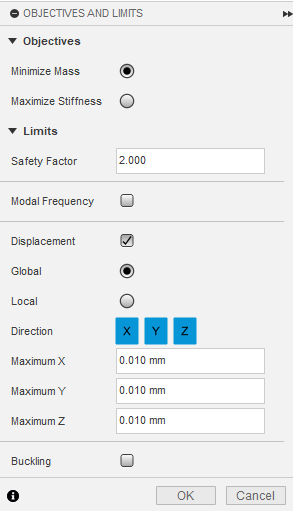
Now that the loads and constraints are set, all that's left is to configure the settings for the solver. Starting by setting the 'Objectives', shown below. I left the Safety Factor as 2, but given the low loads we're talking about here, I'm guessing it's likely to hit the minimum thickness limits before getting anywhere close to this (this minimum thickness parameter can also be changed, but in a different setting window). I opted to also require displacement limits in addition to the stress limit. The thought here was that I don't want my camera bouncing around on me as the bed whips back and forth. So I targeted a somewhat ambitious 10 microns of max movement on all axes...this is only going to make that Safety Factor even less important :)
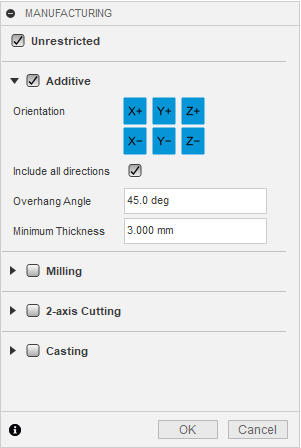
Next is setting up any specific considerations for the manufacturing process you intend to use....this is the area of these software tools that I most hope to see advance significantly in the coming years.... Although it does 'support' multiple fabrication types, in my (admittedly limited) experience, it is not particularly good at actually incorporating Design For Manufacture into the solutions. But, this is where I can set things like overhang angles and minimum thicknesses.
And, last but not least I just have to set a material, if not already configured in the solid model. I selected the only aluminum flavor Fusion lists under its Additive Materials list (AlSi10Mg). I'm not sure which specific alloy PCBWay uses, but I'm assuming it will be similar. I know that for the metal AM that I have worked with previously, they tend to use alloys that I've never heard of but that are well-suited to the process.
--Update from the future, I went and looked on PCBWay's site and they are indeed using this AlSi10Mg alloy. So tip-o-the-hat AutoDesk :)
Now that everything's set up, all that's left is to hit 'submit' and wait....and then wait a bit longer...it's not the fastest thing...but then again, neither am I.
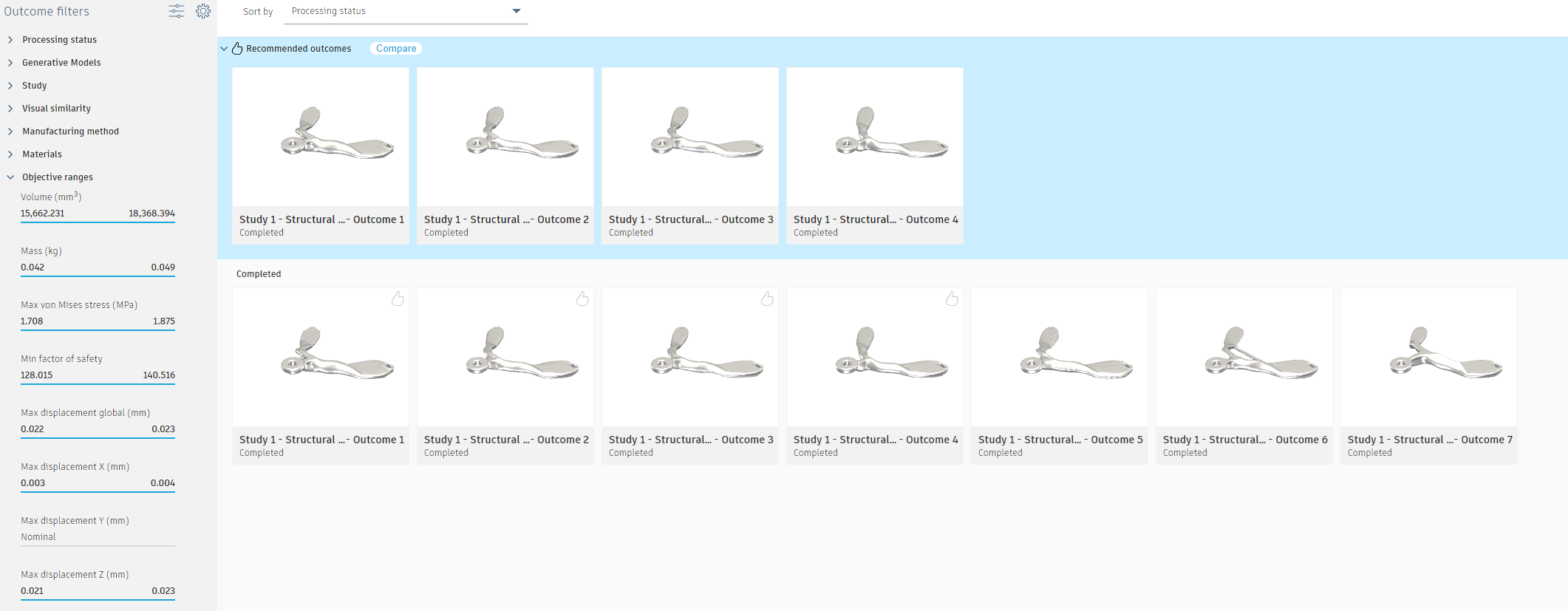
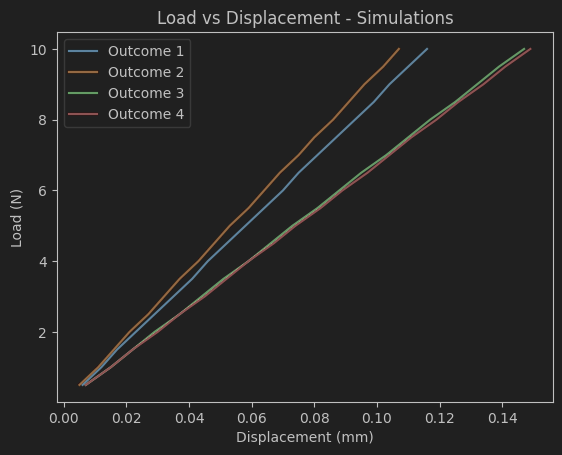
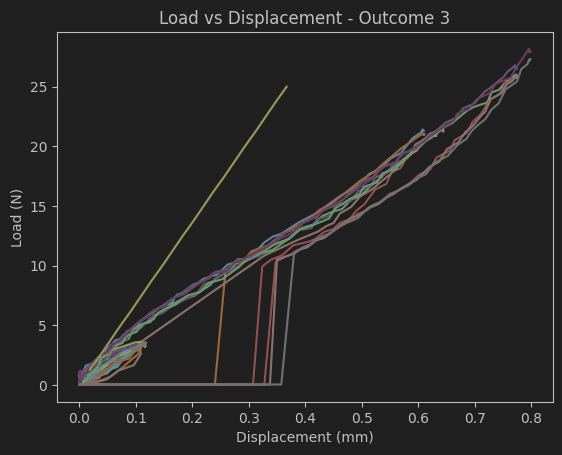
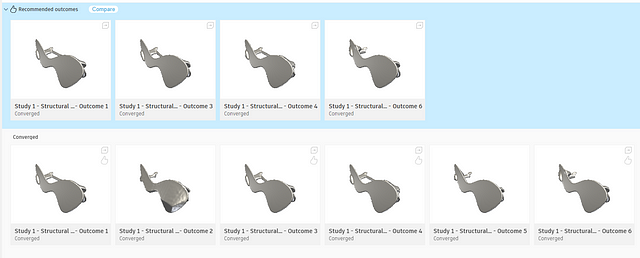
Although, it is kind of enjoyable watching as the solver iterates through, getting ever-cooler looking designs. And when it's done (assuming it converges) it reveals all of the different variants that resulted. My assumption is that each of these "Outcomes" represents some difference in starting conditions in the solver, but it's not obvious exactly what these changes are.
But, regardless of how it got there, we now have our parts to do with as we please! From here, I could export them to a Design environment, to modify or integrate into a larger design. But, since one of my goals with this project is to look at the generative design to metal printing pipeline, I just exported them directly to STEP files to send em off for printing!
Ordering
A huge thank you to PCBWay for sending me these parts for free! But even without getting them for free, I am really excited by the thought of having access to metal printed parts like this! The only metal AM parts I've had access to in the past were through my day job, and even internally they cost at least $1k just to get them to put the powder in the machine. I was blown away when I went through the quoting on these and saw that would have only cost me less than $40 each. And they aren't paying me to hype this, I promise, just the comp'd parts for credit on YouTube. I just genuinely think it's wild that garage tinkerers like myself can now get these kinds of parts for less than the cost of going out to dinner....the future is awesome :)
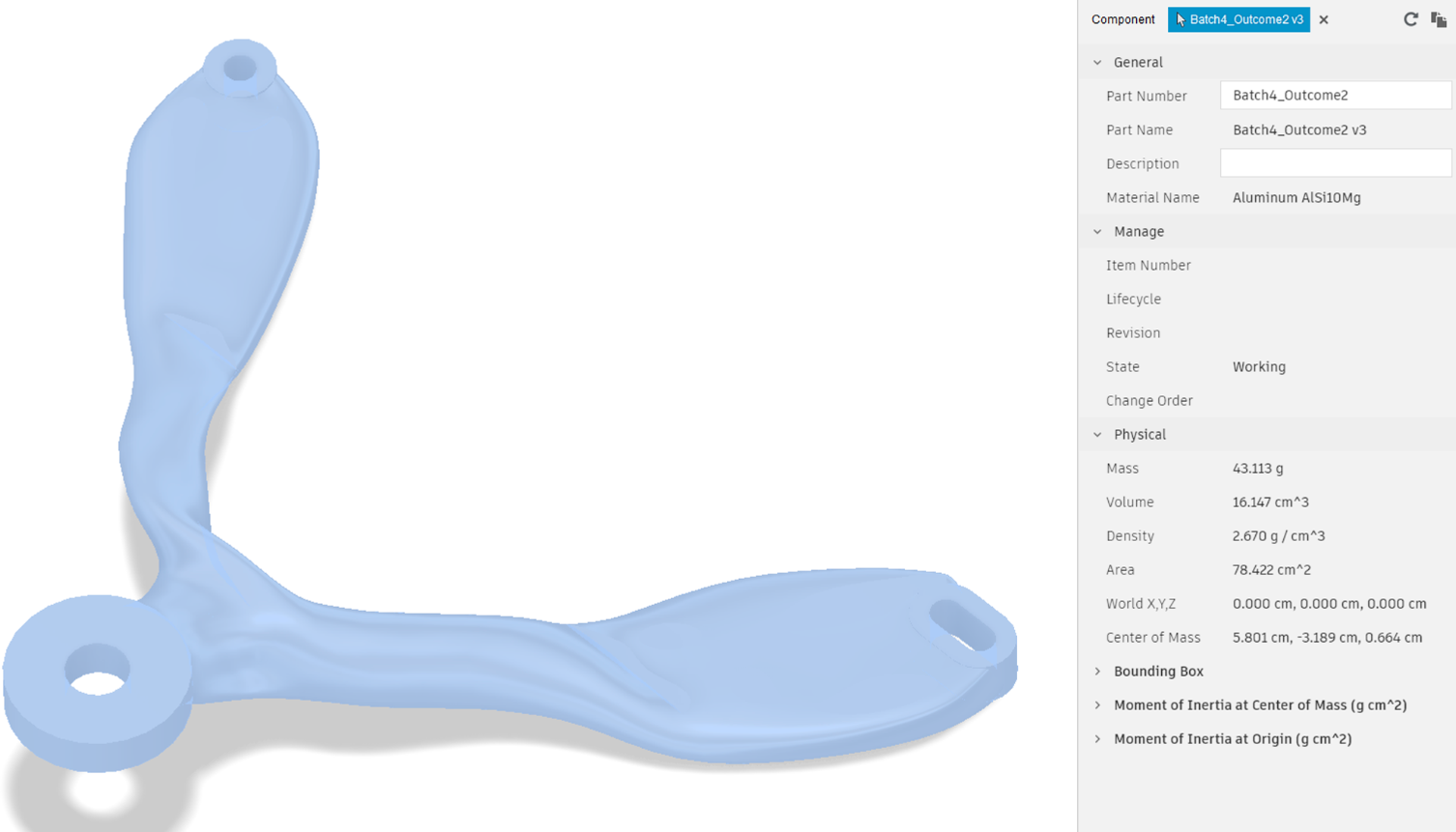
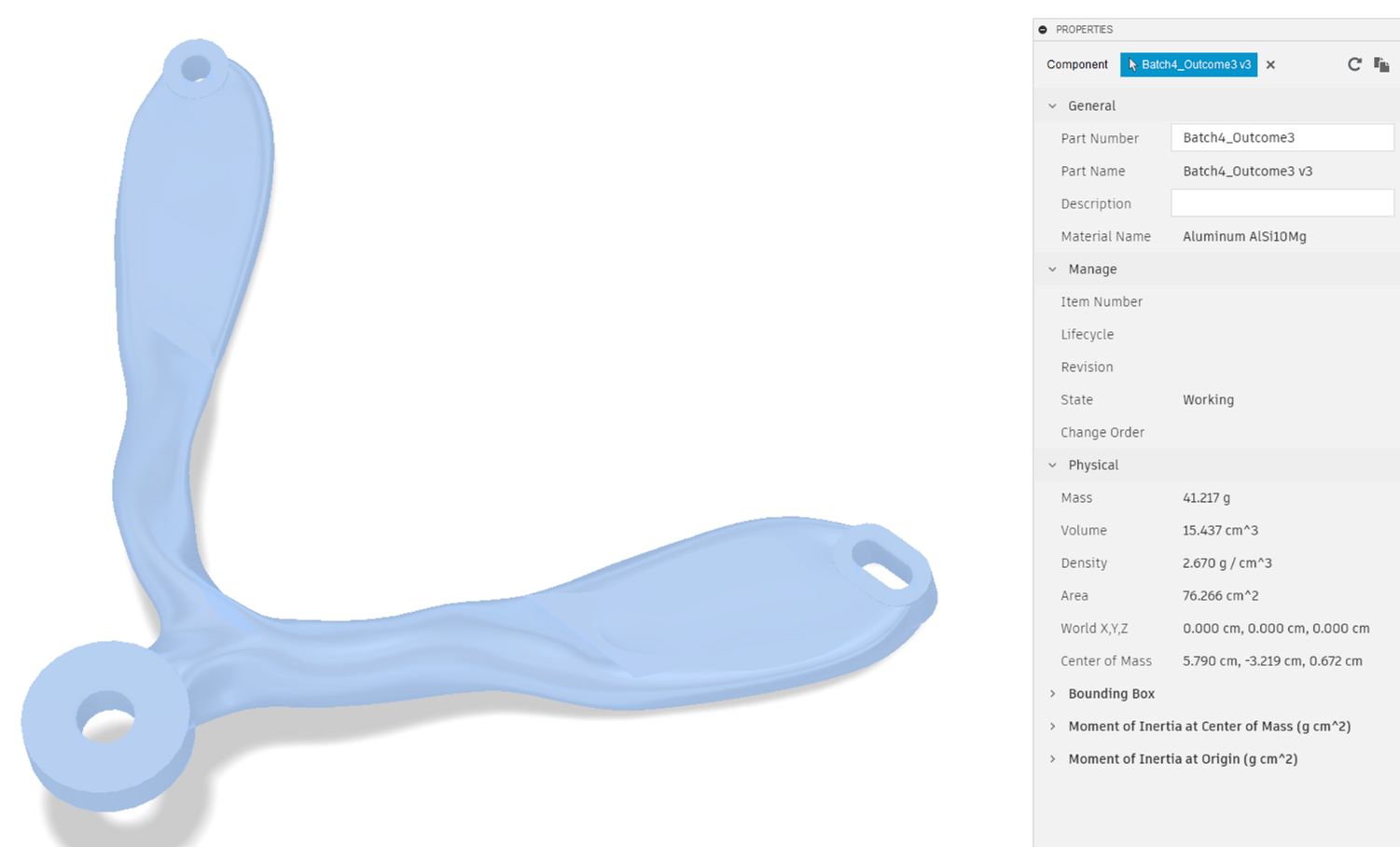
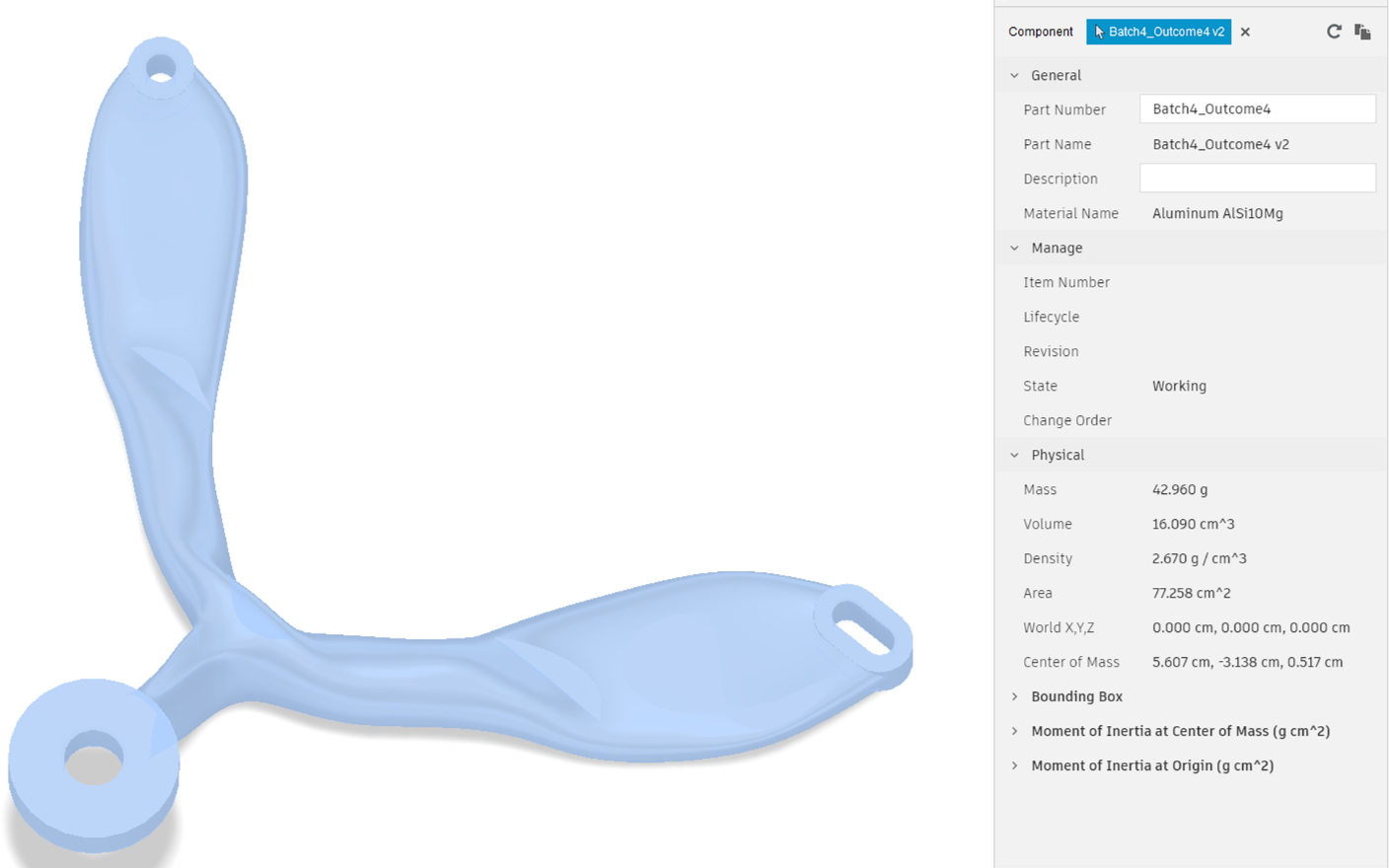
But anyway, I digress. I took the four 'Recommended' designs from Fusion360 and uploaded them to PCBWay's quoting system. I clicked on Titanium and tried desparately to justify to myself why I needed it. After failing at that, I clicked the aluminum option and skimmed the other options, but the defaults all seemed ok by me. So I sent em off for fab and got back to work on my Mechanical Tester to try to have it ready for some fun once the parts arrived. More on that below.
....two....weeks....lata....ish
Measuring
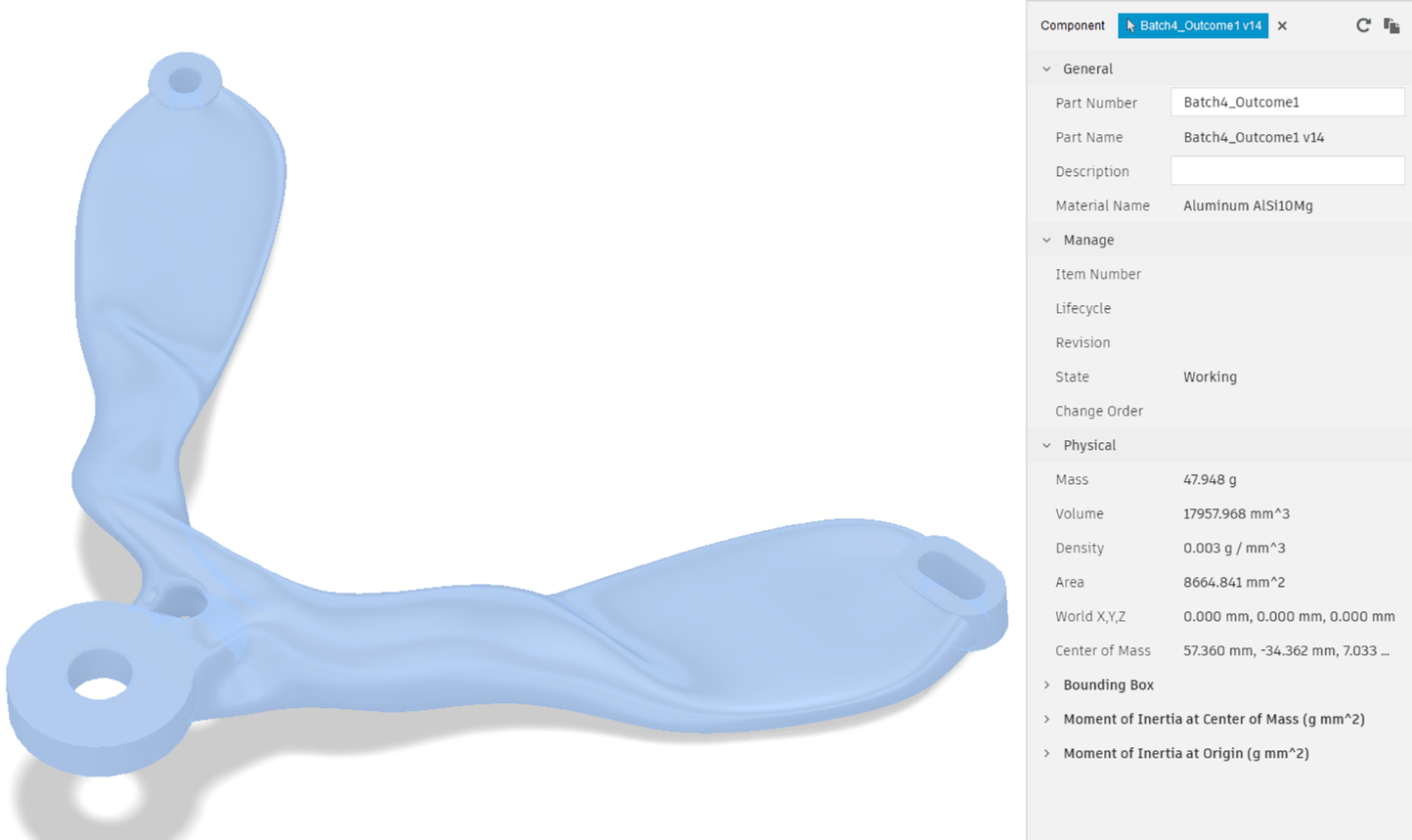
Mass
47.9g
43.1g
41.2g
43.0g
Wow...I'm actually pretty surprised by how closely the actual masses came to the predicted. My take aways from this are:
There is not substantial porosity in the part. This does not necessarily mean that all of the powder was fully melted, but since even the high packing factor powder mixes used in these processes has a few percent void space, it does bode pretty well. Bases on the bit of deformation visible on a couple of the camera mounts, my hunch is that they have the laser powered cranked up a bit. That will give some margin on getting density, but it makes me wonder what sort of issues they may have with risidual stresses in some parts and how they're handling that.
There is not appreciable over or under printing increasing the total volume of material.
Of course, it's possible that some combination of the above things could just be canceling out, but the odds of all four parts being so close to nominal makes me think that's less likely.
Dimensional
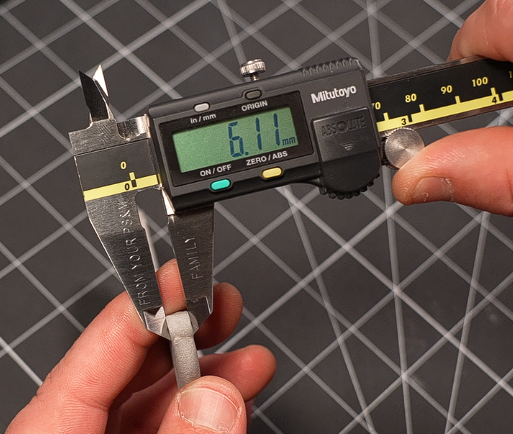
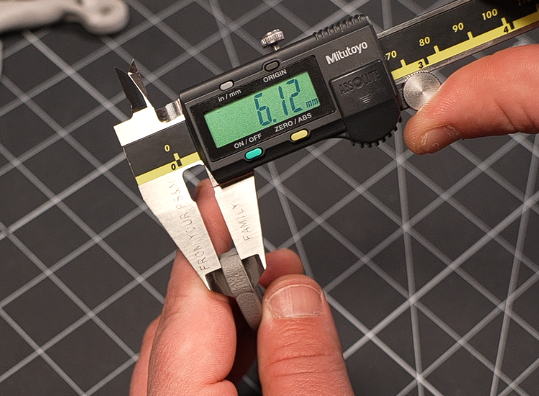
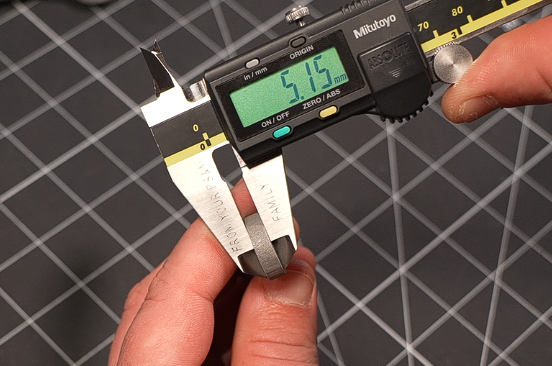
I by no means did any sort of 'real' inspection, but I did put the calipers to a couple of key dimensions for each part to compare to the nominal "keepers".
The one that's most likely to impact performance is the thickness of the bed mounts. The existing spacers are nominally 6mm....well crap....as part of putting this write up together, I discovered I somehow messed up here! Turns out, these are actually nominally 5.5mm (mine all measured between 5.52 and 5.54 millimeters). Well damn, I guess this speaks to how good bed leveling is! I've now made several parts with these mounts installed, and apparently they aren't off by the 0.1 - 0.2mm that I thought they were (based on the measurements shown in the pictures below)...more like between 0.6 and 0.7mm. For the models that I upload to sharing sites, I will update the model to reflect this 5.5mm length.
But anyway, my poor quality control issues aside, what I wanted to show with the below was supposed to be that it does indeed appear there is a little bit of overprinting, about 100-150 microns for the thicknesses of the bed mounts.
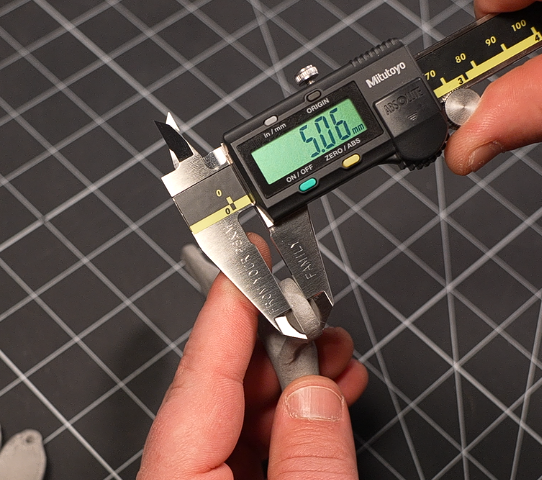
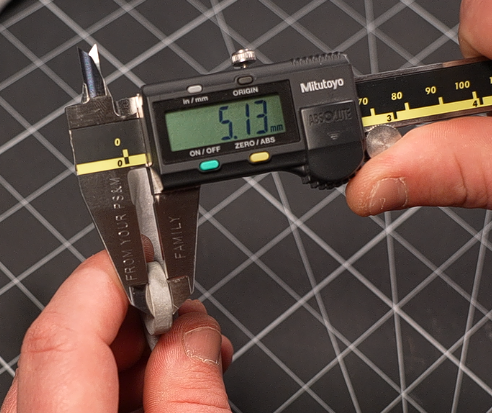
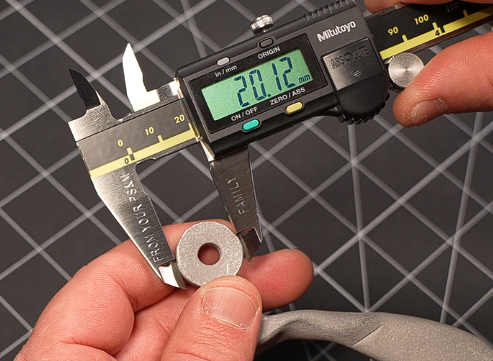
Taking a look at the camera mount, we see a comparable amount of overprinting. The extra thick boyy down in the bottom right isn't an overprinting issue. I decided not to add obstacle geometries on that face, and the solver added an interesting little ring of material here. Since the only thing touching this face will be a fastener head, it isn't an issue. But next time I'd probably go ahead and add the blocking geoemtry just so it can be sized for a specific fastener length.
One additional dimension I'd be curious to take a closer look at is the diameter of the camera mount, but I've noticed that they all have at least some level of circularity...challenges. Unfortunately, I'm not really equipped to get a good measure on that, so I'm just going to save that for another day. But as you can see from the one measurement on "Outcome 4" below, they did come out generally close to the nominal.
Mechanical Testing
This is, quite honestly, the part of this project that I've been most excited about....it's also the part that definitely still has the most to go before I'll be happy with it.
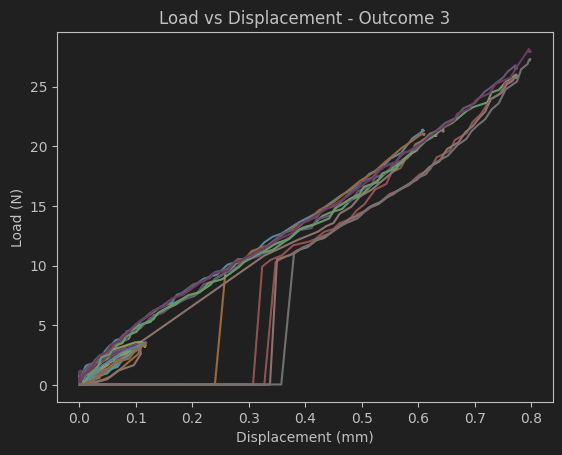
While I've been playing with generative design tools like the Fusion360 one that I showed above for a couple of years, I haven't had the opportunity to get real data to compare the software's prediction on the strength of the part to that of its real world counterpart.
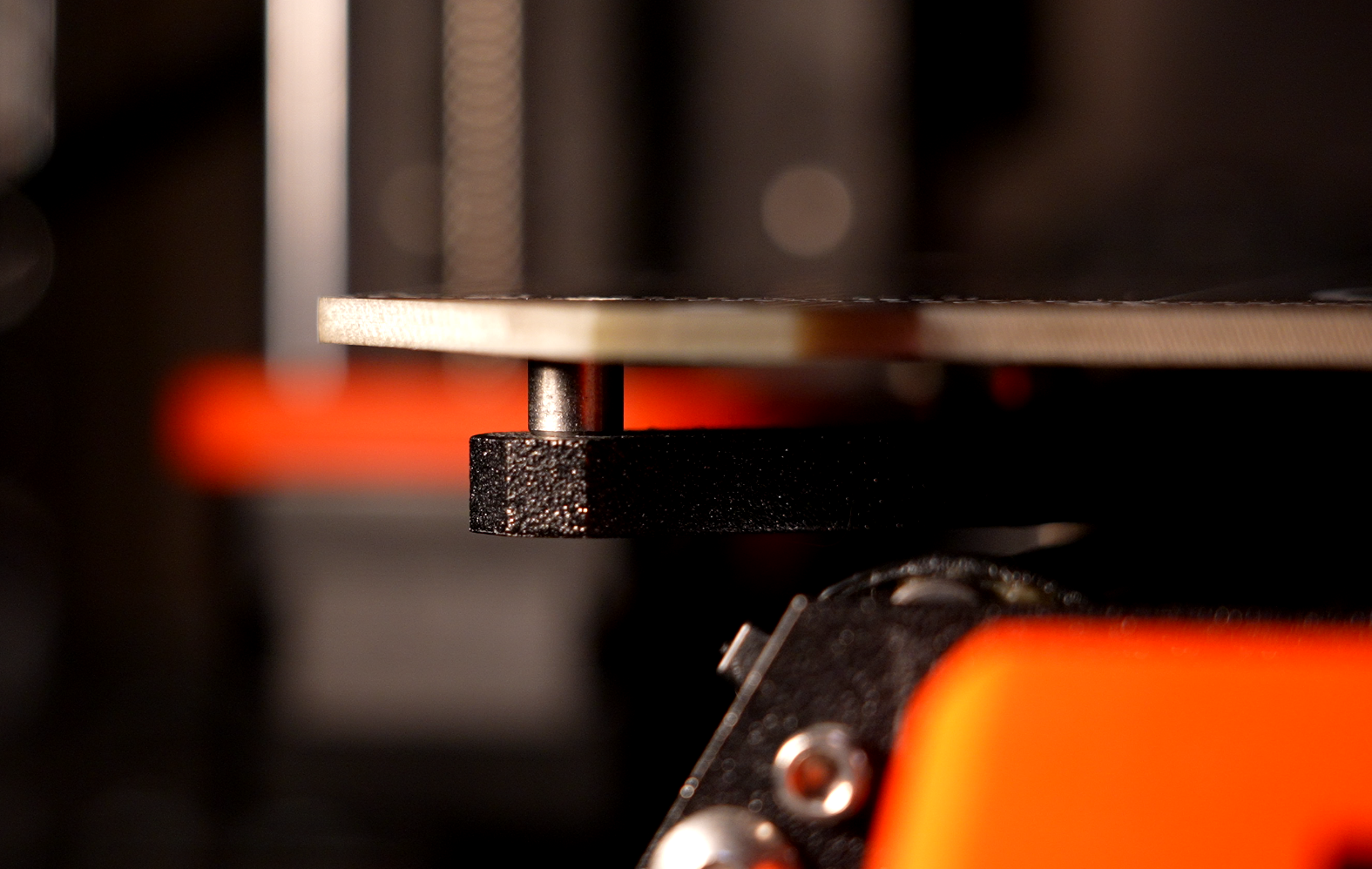
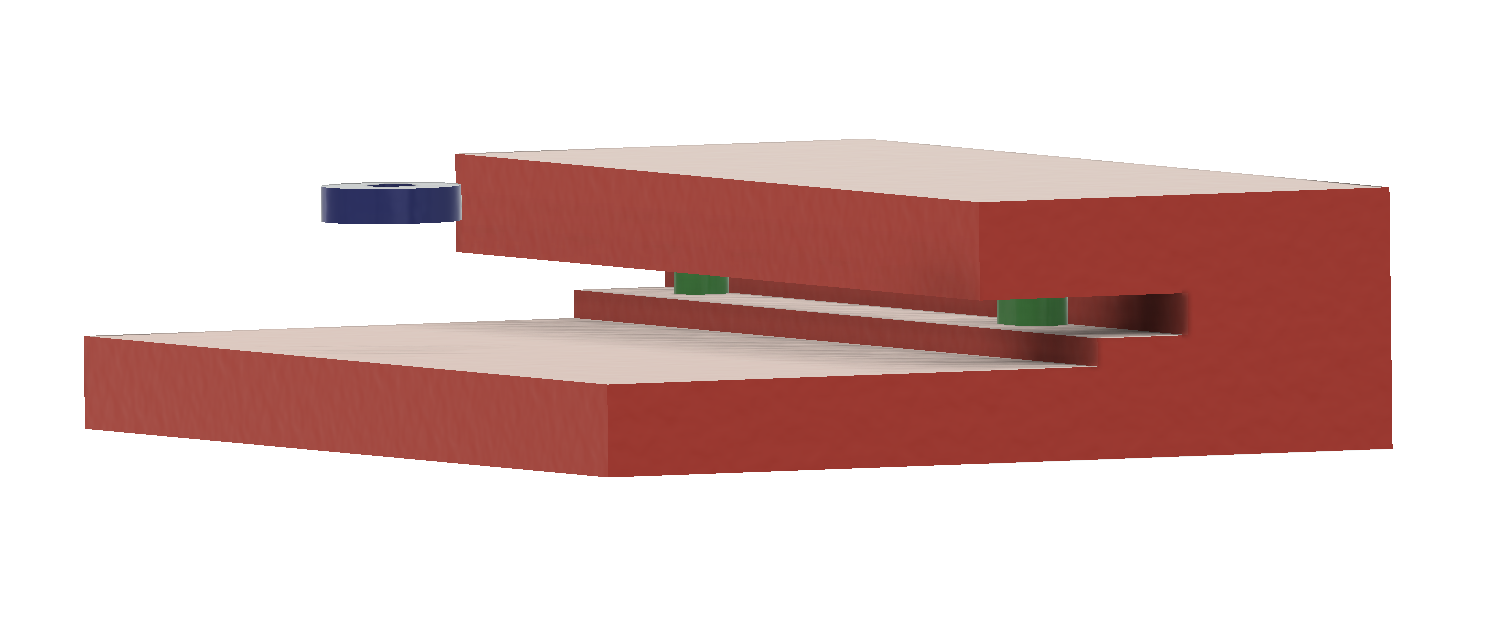
The metric that I'm equating to "strength" here is actually stiffness. That's something I can measure fairly one-to-one between the simulation and the physical tester. But to make that possible, I first needed a way to measure the deflection of the part as I apply load (the Mech Tester thus far has only been instrumented for load). So I rigged up a displacement sensor that mounts underneath the mount in the tester (that's that hideous yellow fella with the super-safe razor blade stuck to it.)
The big delrin ball is just there to try to keep the force applied as close to a pure Z-axis load as possible, since the ball can't transfer a moment (other than from whatever friction there is between it and the aluminum parts on both sides).
Design Notes
2024/02/14 - Initial stab at it
To start, I'm going to see what I'd get if I design for a GoPro, but I don't really intend to go with anything larger than a Raspberry Pi HQ camera. So we'll see how it looks with a GoPro mass as a conservative first pass.
According to the GoPro site, the GoPro 12, with battery, weighs in at 153g.
For the model, I started with just defining the contacts for under the bed. The right one is slotted to allow the bracket to be used on either the right or left side. And, frustratingly, these are not symmetric for some reason. So it is slotted to allow for either the 105mm (left) or 110mm (right) position.
I added in the disk for the camera mount. It's basically just a bit 1/4-20 washer. I offset it 75mm from the centerline of the stage fasteners and with its bottom surface 15mm above the bottom of the bed spacers. This should put the plane of the camera mount 10mm above the print surface. This seems like a reasonable spot for a nice wide angle timelapse.
I then added in a first swing at a keep out zone. I think I covered everywhere needed, but I'm sure I'll be wrong :)
I set one face of each space as fixed.
I approximated the load of the camera mass at 2N.
To get a rough number to use for the side loading due to acceleration, I got an accel rate of 1000mm/s^2 from a quick perusing of forums. So I put that with the 153g GoPro mass and got 0.153N....to be fair, I put it in MathCAD before I knew the number would be as easy as 1000...
Again, to be conservative, I'm going to round this up to 0.5N. And I will apply two load cases, one in each direction of Y movement.
I'm ultimately hoping to send this to PCBWay to take advantage of their metal AM, and have this printed in Al. So I set the only Al option in Fusion's additive materials library and started the solver runnin!...now I wait...
First batch of solutions are done! Overall, they look pretty good, other than I forgot to include keep outs inside of the bores. I'm also a little worried about that spindly little link to the left mount.
I added some material to the keep out for the holes. I also changed the constraint for the left side mount to be only constrained in Z. My hope is that this will force a little bit of cross-bracing.
I also updated the 'design objectives' to include a maximum deflection criteria. I set it at 0.01mm globally, which may be a bit too optimistic. So once I see what comes out I can adjust if needed.
Well I didn't get the cross brace that I was hoping for, but this definitely looks abit more substantial:
I'm going to call it there for today, but I exported two of the results from that last series to see how a quote looks.
Thanks to “Gabriel Fraga” on GrabCAD for the great caliper model!
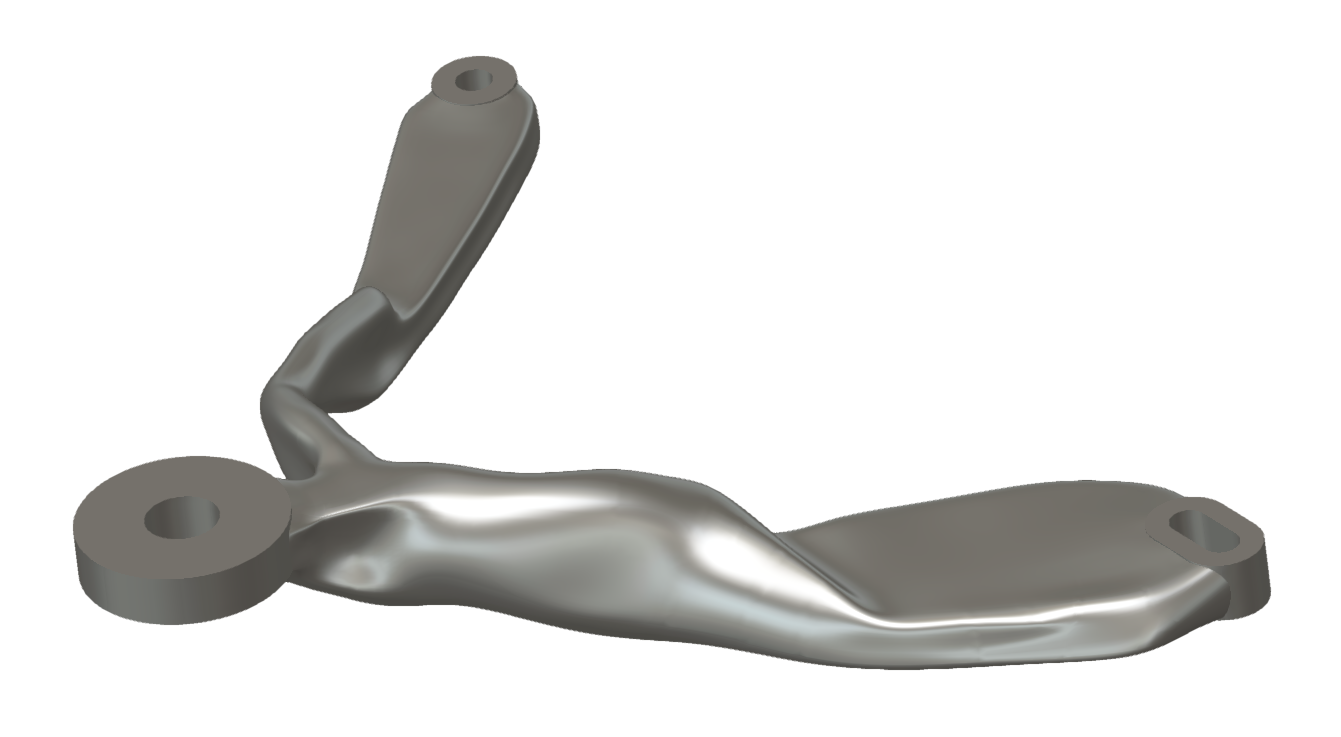
Description: A little combo of Generative Design and Kinematic Constraint (how many cool words can ya stuff into a simple stand!?) It holds calipers. I designed two variations, one for my 6” Mitutoyos and one for my 8” Mituoyos….yeah, I’m sorta partial on my caliper brand ¯\(ツ)/¯ But, I have also used them with a handful of different brands and sizes, with results ranging from “meh, it’s fine” to “seems the same as the designed”. In my experience, the biggest factor that pushes it to the former mainly just comes down to the jaw geometry.
The 6 inch stand (shown above) and the 8 inch stand (shown below) were designed with the same basic approach to the Generative Design constraints described below.
The Design
This isn’t intended to be a ‘how to’ for using the Fusion360 Generative Design extension (nor is it me endorsing that particular product. I have used it for a handful of projects, but I can’t say that I think it’s cost-effective for the vast majority of people currently.) Instead, I just wanted to give a quick description of my thought process in the design of this little desk accent.
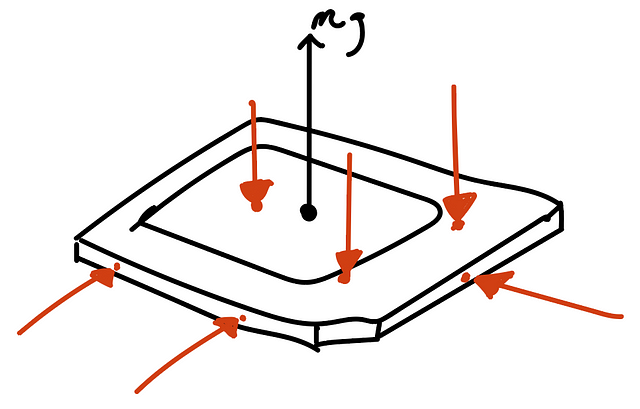
The below sketch (believe it or not, the product of a full grown adult, and not a small child) is meant to show the approximate Center of Gravity (the darker, down arrow in the center), along with my planned locations for the support points.
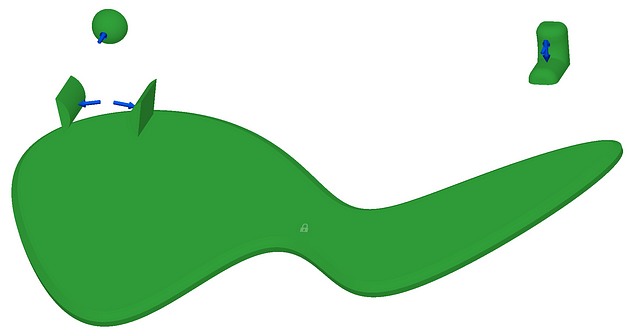
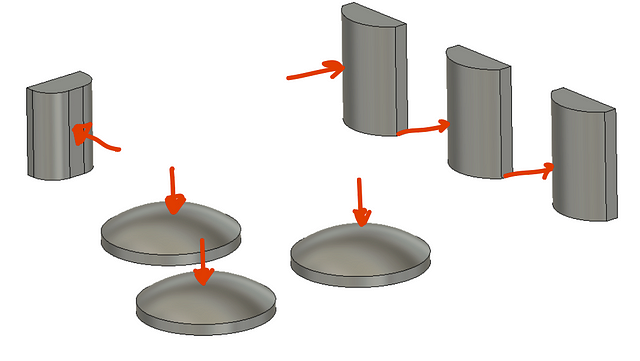
From here, it’s time to jump into Fusion360 and create some bodies at these support points and apply Load Cases. The below image shows the bodies that I created in the 6 in model. The two partial cylinders on the left make tangential contact against the jaws. The hemisphere contacts the back plane of the calipers, on the ground metal surface. The L-shaped contact on the right primarily provides a vertical support on the slide, but it also may provide some lateral support also (more on this below.) These bodies will be my “Preserve Geometries”. These are going to end up being a part of the final component.
This constraint scheme ain’t exactly exact, but hear me out…it’s fine :). What I probably should have done would have been to add an additional contact like the hemisphere, but just moved down slightly. That would have constrained that degree of potential rotation, as well as the translation along the vector path normal to the plane through the cylindrical force vectors….too much? Especially without additional supporting imagery?…Well, my hunch is no one is going to read this, let alone care THAT much about this level of detail on kinematic constraint, so I’m just gonna call this part here…
If you want to learn more about the concept of Exact Constraint, this book is my favorite on the topic. You can also learn more by just searching around on exact constraint, or also, commonly “kinematic constraint” or “kinematic design”…stuff like that. It will also usually get a chapter or so in most texts on Precision Engineering.
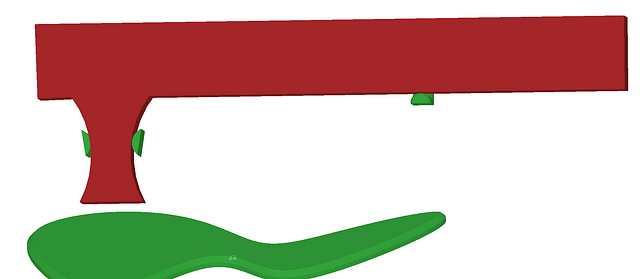
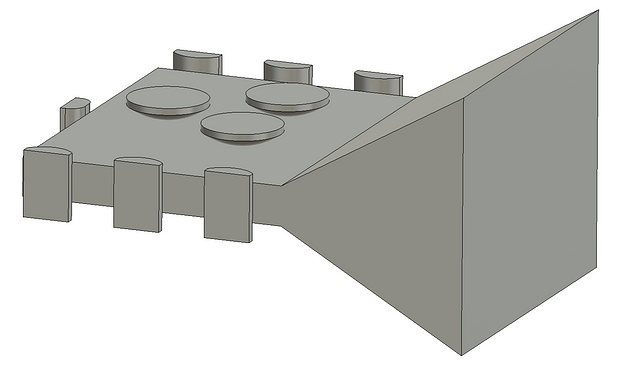
Now on to another vital part of the setup for the GD inputs, and that’s the “Obstacle Geometries”. You can think of these as “keep out zones” for the solver.
In the above you can see where I’ve added my ‘keep out’ zone for the calipers. I need to block out not only the space for the caliper in the final stand, but also any space that needs to be clear for getting them in and out of the stand, etc.
For this model, the Obstacles really are pretty straightforward. I essentially just added some margin around the calipers and then extended it out forward to ensure a clear path along that direction for inserting/removing the calipers from the stand.
Alright, we have our Preserve and Obstacle Geometries, and we have our Constraints and Loads applied. I can then run the simulation…it’s going to sit at “5%” for a shockingly long time…:)
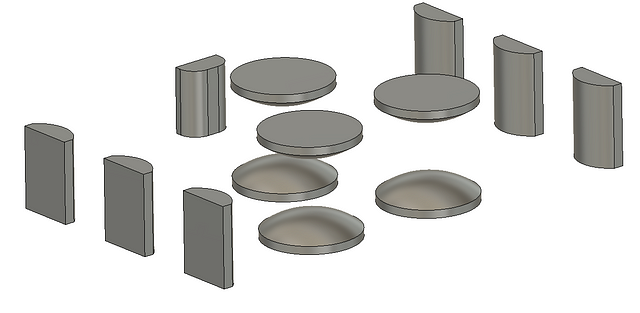
And here are the results!
From here I just selected the outcome that I felt was most print-friendly and aesthetically pleasing, and that’s about that!
If you have any questions or comments, let me hear em! Thanks so much for checking it out! And if you’d like to see another of my generative design projects, you can take a look at my GD SD Card Tree.
Oh, and please note, I’m not saying this is THE way to design parts with Generative Design tools, this is just A way, and it’s a way that I enjoy :)
**Please note, many of the links contained in my articles are “Affiliate” links through that vendor. Unless specifically otherwise mentioned in the context of the link, these are items that I purchased and used from that same product page for whatever the project (or prospective project) was. I use these Affiliate links to help recoup a little of what I spend on project materials, etc. (if you’d like a sense of scale….in the week that I write this, I have brought in a startling $0.75 :) ).
My favorite part about designing with GD tools is how beautifully it ties in with the principles of Exact Constraint/Kinematic Constraint, which have long been central to precision engineering applications (my ‘day job’ for most of the last ten years). It really creates a great opportunity to think about a design purely from a standpoint of constraints, loads, and keep out zones.
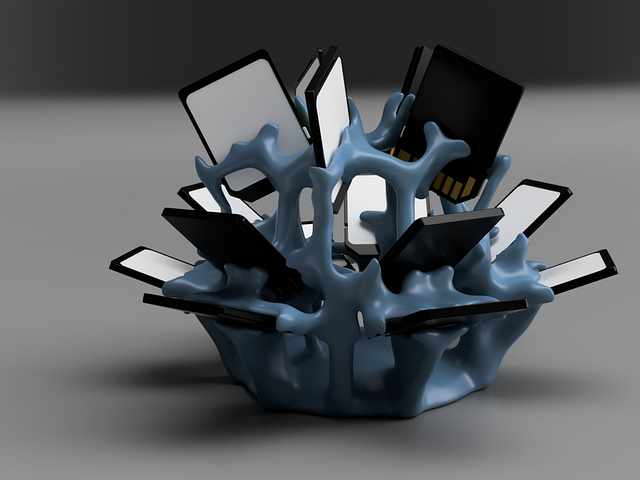
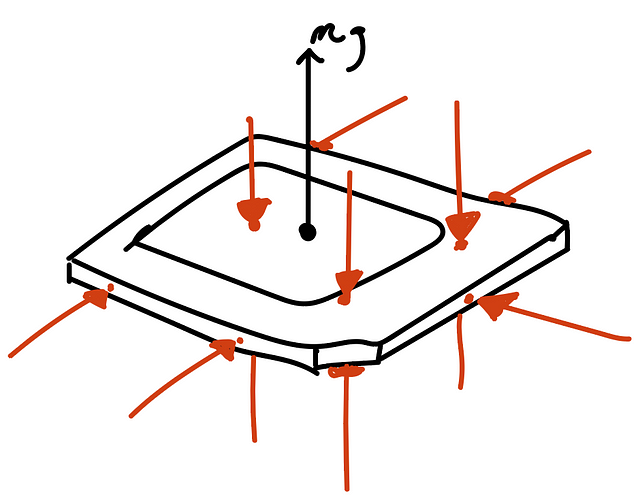
But anyway, aside from my fondness for playing around with these tools in general, back to playing around with them for an SD card holder specifically! The below sketch shows the rough concept for constraint points that I’m thinking for supporting the SD cards. And yes, I did put gravity pointing up…deal with it, orientation is a concept :) have you read Ender’s Game….if not, trust me, that isn’t THAT random of a connection…SOOO good!..what were we doin? Oh, yeah, SD card, got it. Yeah, 6 support points, 6DOF…checks out!
Because this is just for sitting on my desk, and I’m not intending to use this at all for transporting cards or the like, I’m actually not going to preload the cards into this constraint set (shocked gasps!) I’m ok with them jostling around a bit within their respective homes, so essentially what I’m going to do is just mirror that constraint set shown but with liberal clearances.
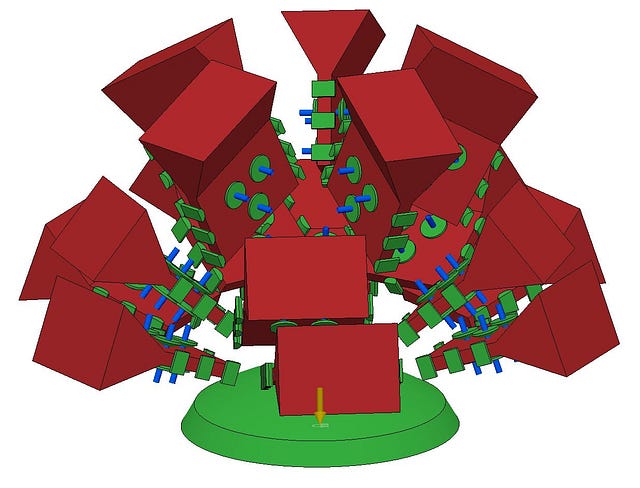
And here is the ‘one half’ constraint set implemented as solid bodies in Fusion360. One difference here is that I’ve added an additional constraint on the ‘side’ (the three column-lookin fellas there on the right). The further these side contacts can be spaced apart, the better the constraint against rotation around my lil mg vector shown above. So I wanted a constraint as close to the end of the card as is feasible, but my concern was that for some cards or some print conditions, this contact may not happen as intended, and so the redundant contact in the center was added.
And here is the full constraint set for a single card…you can mentally (or physically, have fun) draw your own force vector arrows :)
I then created a ‘keep out zone’ body. I just went with a simple block that fills the full tolerance/clearance zone for the SD card. I then put a simple flare out for access to grab the cards.
Alright! Off to the GD fun!…Oh, wait, a single SD card isn’t exactly ideal….so I did some patterning…from here on it’s a BIT of an eye sore…you’ve been warned…
Once all of the elements were populated, I moved to the fun of applying loads and constraints to this cluster…didn’t really think through the downsides of designing something with GD that is holding lots of discrete parts :)
The only load case I applied was for a static loading, but I did significantly ‘overload’ it a bit. I applied a normal force to every one of the interface bodies shown above, and applied a 6DOF fixed constraint to the base.
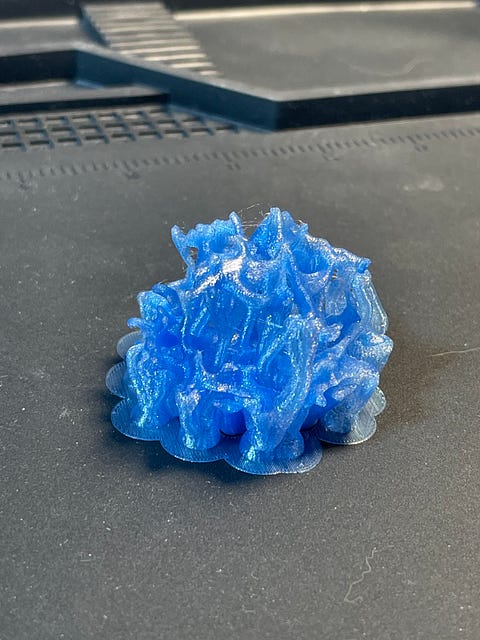
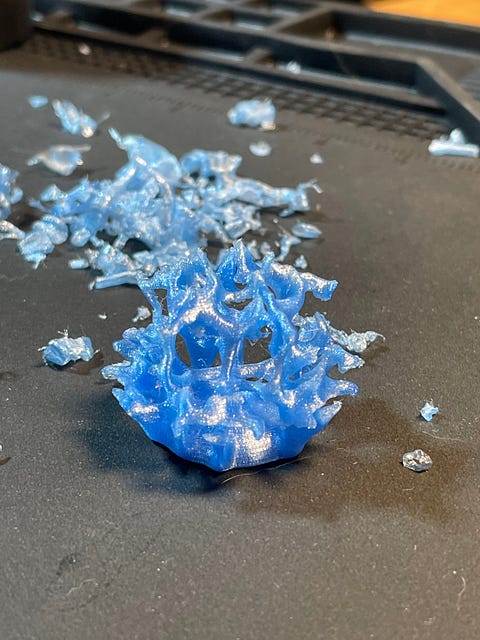
Unfortunately, it appears I ran another simulation on this file and can’t access the previous version….? 🥺 So I don’t have the full set of results from this run to show (and my license expired this week, twas fun while it lasted!), but here are the two versions that I saved and ultimately printed:
Here they are as amorphous blobs, fresh out the vat! They (roughly) line up with their respective modeled versions above. These were printed in Siraya Tech Fast — Smokey Black (pretty much my go to resin these days for ‘just works’ prints) on my Elegoo Saturn 8k (yes, I bought this AFTER the Saturn 2 came out…actually, I’ve bought two of them since the release of the 2. I personally just prefer the form factor and the capabilities seemed identical ¯\(ツ)/¯).
Oh, and quick aside, but if you print with resin and HAVEN’T already switched to flexible build plates…bruh….why??? :) Seriously though, Prusa, good on you for setting this standard, it is such a game changer to me!
And here’s one scaled down to 46%, makin it a microSD card holder and printed on my Mk3s+ with a 0.25mm Revo nozzle on it. It’s printed in this PETG from a brand I hadn’t tried before. I bought three colors; the blue that the print is in, their transparent red, and the clear. They all have printed nicely, but the blue has hung around the longest and I’m pretty sure it’s taking up water pretty aggressively (and starting to get stringy)….hold on, what were we talkin about? Oh, right, the SD card holder…actually, I think that’s all I’ve got really on that :)
If you’re interested in getting a quick handle on the concepts and examples in Exact Constraint, this book is the one I keep handy and always recommend to new folks in precision work.
Flexible Build Plates for resin printing
I have three resin printers, and I’ve put these on all three of them….come on Elegoo, can you please just do me a favor and toss these on at the factory??? They’re spring steel sheets, like what you’d find on a Prusa (since Mk2…I think?), but just clean stainless, sometimes with an etched or otherwise patterned surface.
I’ve used Wham bam (the regular, not the XTR versions), for all three of mine, but I’m very curious to hear comments from anyone that’s used the ‘generic’ versions these available at Amazon and the like.
The kits come with a magnetic plate that you adhere to your existing build plate surface. It’s USUALLY pretty straightforward (or at least it has been on the Saturn and Saturn 8k), but on one machine I did run into a problem where the addition of the magnetic plate caused the homing sensor to not be able to get within range. The fix was quick and easy, I just designed and printed a longer homing trigger. BUT if you don’t have a second printer handy, this could be a huge PIA! Once the magnetic plate is on, it’s not comin off easily! So I’d recommend doin a little googlin on your specific printer model just to see if there might be anything you’ll want to have printed prior, just in case.